Dynamics Of Nonholonomic Systems !!top!! Jun 2026
In holonomic systems, we can reduce the problem: express velocities in terms of a smaller set of generalized coordinates and their derivatives. Lagrange’s equations then apply directly.
Because the coin cannot "slide" sideways, its velocity is always tangent to its heading. While the coin can reach any
This leads to the , which differs from the standard Euler-Lagrange equations in a crucial way: the constraint forces do no work under virtual displacements, but real displacements (which must satisfy the constraints) may still lead to energy-conserving but non-integrable motion. dynamics of nonholonomic systems
But here’s the rub: because the constraints are non-integrable, the system’s accessible tangent space is a distribution —a subspace of the tangent space at each point that changes smoothly but cannot be integrated into a global coordinate slice of configuration space.
“The wheel is a nonholonomic invention. Without it, civilization would still be holonomic—constrained to the spot.” — Anonymous control theorist. In holonomic systems, we can reduce the problem:
Trucks with multiple trailers exhibit complex nonholonomic behavior. The "jackknife" effect is essentially a failure to manage the nonholonomic constraints of the linkages during deceleration or reversing. 5. Conclusion
Surprisingly, nonholonomic constraints can be an advantage in robotics. Even with fewer actuators (controls) than degrees of freedom, a system can often reach any point in its configuration space. This is known as . It explains why a car (with only 2 controls: gas/brake and steering) can navigate a 3D configuration space (x, y, and angle). Path Dependency While the coin can reach any This leads
The following are some examples of nonholonomic systems:
Think of a vertical coin rolling on a plane without slipping. To describe its state, you need its position, its orientation , and its rotation angle
You May Also Like
21 1 月, 2019
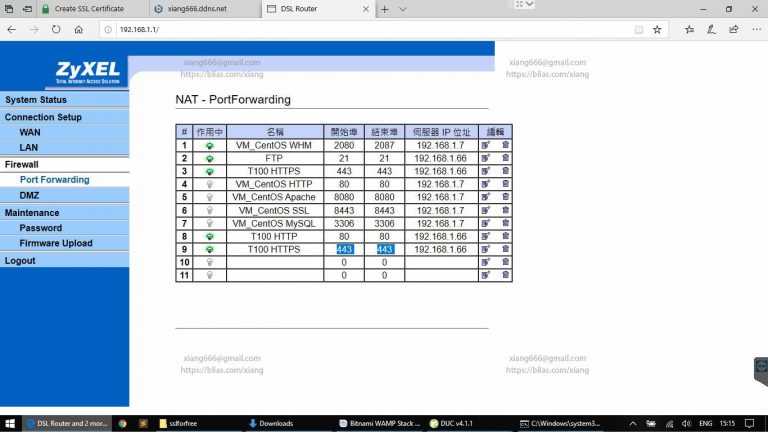
(三)免費的Domain與DDNS設定,一切交給no-ip處理!
21 1 月, 2019
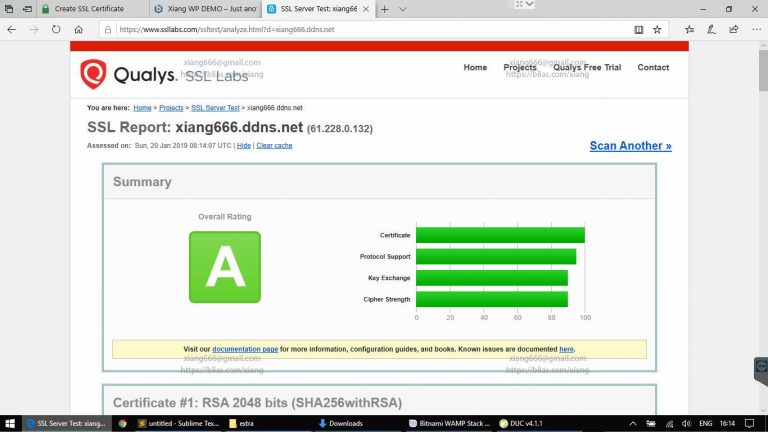
(四)申請&設定SSL 靠Let’s encrypt簡單搞定